Bellman-Ford 贝尔曼-福特算法,是求含负权图的单源最短路径的一种算法。特点:支持有环,负权重,但不能存在负权重环。
最短路径树及边的松弛,相关概念见《算法 - 最短路径树以及 Dijkstra 算法》。
算法定义
Bellman-Ford 算法:在任意含有 V 个顶点的加权有向图中给定起点 s,从 s 无法到达任何负权重环,以下算法能够解决其中的单点最短路径问题:
将 distTo[s] 初始化为 0,其他 distTo[] 元素初始化为无穷大,以任意顺序放松有向图的所有边,重复 V 轮。算法证明如下:

算法实现
1 | // 重复 V 轮 |
根据算法定义和实现可以看出,Bellman-Ford 算法需要重复 V 轮,每一轮都会对所有边(E 条边)进行放松,时间复杂度总是为 O(EV) 。具体步骤看下面动画:
动画演示
- 负权重边
- 负权重环
基于队列对算法改进
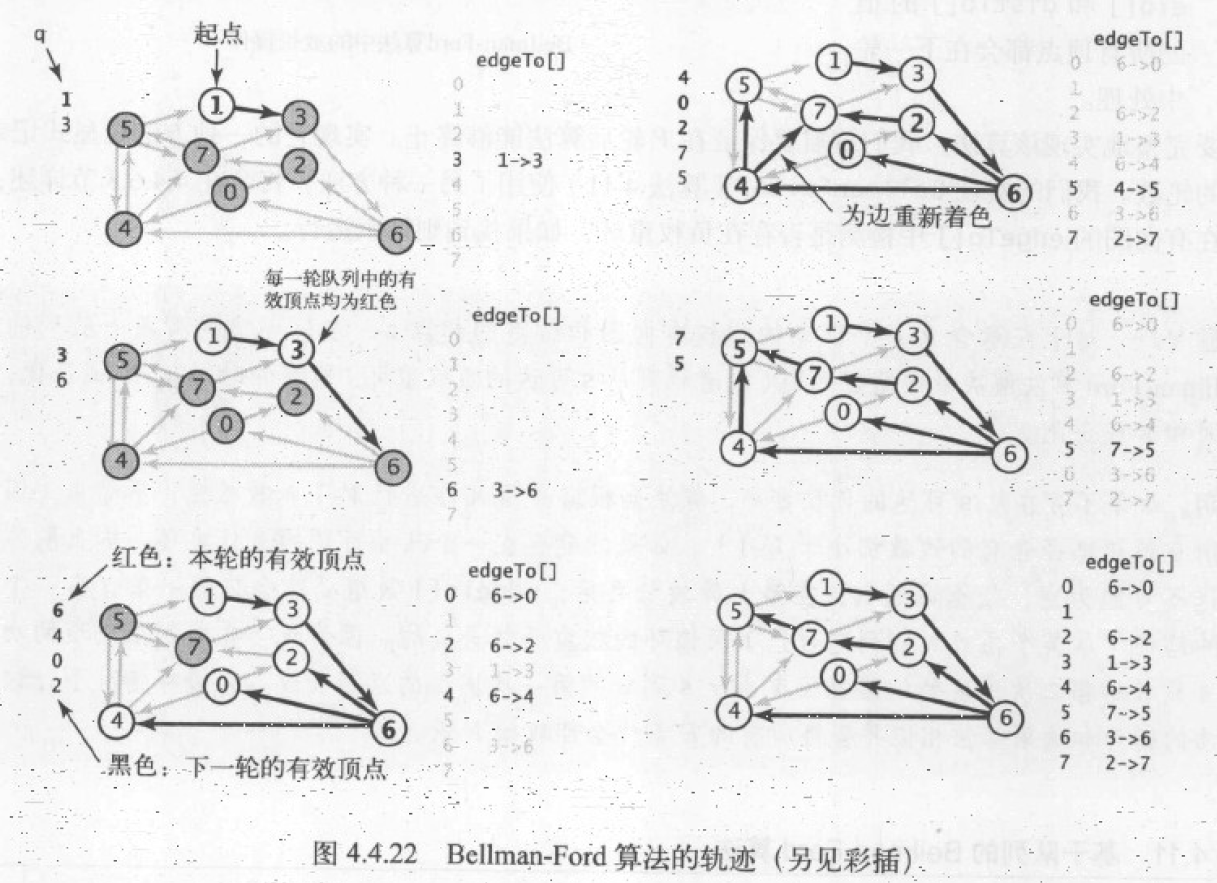
在 Bellman-Ford 算法的执行过程中,很容易发现任意一轮中,很多边的放松都不成功:只有上一轮中的 distTo[] 值发生变化的顶点指出的边,才能改变其他 distTo[] 元素的值(可以参考负权重环算法执行动画)。SPFA: Shortest Path Faster Algorithm 是 Bellman-Ford 算法的一种队列优化。使用一条 FIFO 队列记录这样的顶点:放松边的顺序是出队顺序;当 distTo[w] 值发生变化的顶点进入队列,即放松生效时的顶点入队。
算法轨迹
算法实现
Queue<Integer> queue队列
一条保存即将被放松的顶点的队列。boolean[] onQueue数组
用来指示顶点是否已经在队列中存在,防止将顶点重复插入队列。double[] distTo数组
记录起点到当前顶点的,最短路径估计长度。DirectedEdge[] edgeTo数组
记录起点到当前顶点最短路径上,最后一条边。也就是说前驱顶点到当前顶点的边。
1 | public BellmanFordSP(EdgeWeightedDigraph G, int s) { |
根据算法分析,每个顶点都会至少入队一次,即会放松 E 条边;但是每个顶点在出队被放松后,会存在重复入队的情况(这正是和广度优先搜索最大的区别,广度优先搜索每个顶点只入队一次);也就是说在最坏情况下可能会重复入队 V 次,所以最坏时间复杂度还是 O(EV)。通常情况下,SPFA 算法效率会比常规的 Bellman-Ford 算法快。
负权重环转换
Bellman-Ford 算法对负权重环检测,转换为仅仅需要检测是否存在环的原理:
将所有边放松 V 轮后,当且仅当队列非空时,有向图中才存在从起点可达的负权重环,因此 edgeTo[] 数组所表示的子图中必然含有这个负权重环。所以负权重环的检测,可以转化为 edgeTo[] 中的边构造的有向图,并检测该图是否存在环。
小结
- 权重
边的权重可以为负值,但不能包含负权重环,有向图中可以有环。 - 边的放松顺序
原始Bellman-Ford算法:以任意顺序放松边,放松V轮;SPFA基于队列改进型算法:当distTo[w]值发生变化的顶点进入队列,以FIFO的方式放松该顶点指向邻接点的边。 - 时间复杂度
不管是Bellman-Ford算法,还是基于队列改进后的算法SPFA,最坏情况下的时间复杂度都是O(EV)。
参考文档
- 《算法:第四版》 第 4 章
- algs4: sp
- visualgo动画-Bellman-Ford实现
- Bellman-Ford的队列优化